(图自:MPI-IS / Dynamic Locomotion Group / Felix Ruppert)
 (相关资料图)
(相关资料图)
在大自然中,新生的小鹿或小马驹必须尽快学会行走,以躲避掠食者。即使动物天生就有位于脊髓中的肌肉协调网络,但学习腿部肌肉和肌腱的精确协调,还是需要一些时间的。
起初,婴儿动物主要依赖于硬连接的脊髓反射。虽然更加底层,但运动控制反射有助于其在第一次尝试行走时避免跌倒和伤害自己。
通过一段时间的练习,它们才会掌握更高级和更精确的肌肉控制,直到神经系统最终能够很好地适应年轻动物的腿部肌肉和肌腱。在越过了失控的障碍后,它们就可以跟上成年动物了。
研究配图 - 1:四足机器人 Morti
MPI-IS 动态运动研究小组的前博士生 Felix Ruppert 表示:
作为一名工程师和机器人专家,其正在通过构建一个像动物一样具备反射能力、并从错误中习得经验的机器人。
若动物只是偶尔绊倒,这个错误还不好说。但若它经常绊倒,就可以拿来衡量机器人行走的质量好坏了。
研究配图 - 2:弹性可塑框架示意图
值得一提的是,在仅仅一小时的走路学习后,机器狗 Morti 就已充分掌握其复杂的腿部力学。
在贝叶斯优化的指导学习下,足部传感器测得的信息,可与程序建模的虚拟脊髓目标数据相匹配。
通过不断比较发送和预期的传感器信息,机器狗得以找到循环反馈的改进,调整其电机控制模式来学习行走。
研究配图 - 3:模拟与实践试错的对比参照
学习算法能够适应中央模式生成器(CPG)的控制参数,在人类和动物中,CPG 就是脊髓中的神经元网络。
它能够在不依赖大脑输入的情况下,产生周期性的肌肉收缩,可在步行、眨眼或消化等有节奏的任务中提供帮助。
至于反射,则由腿部传感器和硬编码的神经通路,来触发非自愿运动的控制动作。
研究配图 - 4:CPG 参数与弹性反馈活动
只要幼小动物在完全平坦的路面上行走,CPG 就足以控制来自脊髓的运动信号。但只要地面上有个小颠簸,其步行方式就会发生改变。
为避免跌倒,反射会介入并调节运动模式。而运动信号的这些瞬时变化,又是可逆或“弹性的”。即使受到干扰,后续也能够恢复如初。
但若动物在多次运动循环中不停地跌跌撞撞 —— 即使反应活跃 —— 那也必须通过重新学习运动模式、并使其具有不可逆转的“可塑性”。
研究配图 - 5:塑性适应的结果
新生动物最初的 CPG 调节还不够号,导致其在平坦或不平坦的地形上蹒跚而行,本文介绍的机器狗 Morti 也是如此。
更重要的是,在大约一小时内,机器狗已能够做到比小动物更快地优化其运动模式 —— 这得益于 Morti 的 CPG 在控制机器腿部运动的小型轻量计算机上进行了模拟。
这个虚拟脊髓被放置在了四足机器狗的头背部位置,在平稳行走的一小时内,来自其足部的传感器数据能够与 CPG 的预测效果不断进行比较。
研究配图 - 6:扭矩性能的标准化测量
若机器人绊倒,学习算法会改变其腿的来回摆动距离、摆动速度、以及落地行程。同时调节后的运动,也会影响机器人灵活运用其脚力的能力。
在学习过程中,CPG 会向电机发送经过调整的信号,以便机器狗从此减少磕绊并优化其行走。
但是在这一框架中,虚拟脊髓并没有对机器人的腿部动作设计、电机和弹簧的物理特征有明确的了解。
(来自:Nature Machine Intelligence)
Flix Ruppert 解释称:这台机器狗实际上有些“天生”的特性,即使对自己的腿部解剖结构或工作原理一无所知,内置 CPG 还是可以自然且智能地帮助其行走。
计算机产生了控制腿部电机的信号,起初有些跌跌撞撞。但从传感器不断回流的数据,还是可以通过与虚拟脊髓 CPG 产生的进行比较。
若传感器数据与预期结果不匹配,则学习算法会让它改变行走行为,直到机器人能够在不被绊倒的情况下良好行走。
综上所述,在保持反射活跃的情况下改变 CPG 输出、并监测机器狗绊倒的学习过程,就是其中最核心的部分。
更棒的是,Morti 的板载电脑,只会在行走过程中消耗 5 瓦的电力。
最后,尽管来自某些知名制造商的工业四足机器人已学会在复杂的控制器的帮助下运行,但它们的功耗也要大得多。
-

全球即时看!郑州公布2021年度星级小微企业园 | 名单
头条 22-07-19
-

快看:深圳证监局:部分私募机构涉嫌非法集资、买“壳”卖“壳”等违规
头条 22-07-19
-

天天热议:利率2.48%!洛阳钼业完成发行10亿元超短融
头条 22-07-19
-

世界微资讯!丰富产品供给,周口辖内两家城商行为科创企业提供“营养餐”
头条 22-07-19
-

天天新消息丨河南一高速项目选址公示,途经封丘、兰考
头条 22-07-19
-

全球快看点丨济源城投集团:投资140亿元谋划实施金融岛、棚改等项目
头条 22-07-19
-

世界热头条丨郑州枢纽小李庄站及陇海外绕线工程选址意见公示
头条 22-07-19
-

【环球时快讯】山东上半年GDP为41717亿元,同比增长3.6%
头条 22-07-19
-
【天天快播报】武汉发布交通强国建设试点方案:加强与中原等城市群城际铁路延伸对接
头条 22-07-19
-

全球消息!洛阳出台“隐形冠军”企业培育方案!力争3年确认15家“隐形冠军”企业
头条 22-07-19
-

天天速看:中国矿产资源集团在雄安新区成立,注册资本200亿
头条 22-07-19
-

天天资讯:银保监会就保险销售行为管理征求意见,违反规定最高罚款10万元
头条 22-07-19
-

世界报道:中央全面依法治国委员会办公室启动市县法治建设工作督察
头条 22-07-19
-

实时焦点:国家卫健委:昨日新增本土确诊病例199例
头条 22-07-19
-

当前资讯!总投资7亿元,商丘这家医院获批复,位置公布
头条 22-07-19
-

环球关注:规模不低于200亿元!濮阳拟设立氢能产业发展投资基金
头条 22-07-19
-

天天关注:郑州1~5月累计投放应急转贷资金19.2亿元
头条 22-07-19
-
视讯!郑州上半年一般公共预算收入697.4亿元,同比口径增长1.5%
头条 22-07-19
-

【天天新要闻】上半年广东GDP达5.95万亿元 同比增长2%
头条 22-07-19
-

全球快资讯:天津北辰区发生爆炸事故 现场正在救援中
头条 22-07-19
-

当前热文:河南昨日新增本土无症状感染者45例
头条 22-07-19
-
每日资讯:安阳市委书记袁家健会见合众新能源汽车董事长方运舟一行
头条 22-07-19
-
天天热门:河南拟新增一家典当行,注册资本金3000万元
头条 22-07-19
-
全球看点:楼阳生到省检测中心、豫检集团调研
头条 22-07-19
-

环球精选!隔夜欧美·7月19日
头条 22-07-19
-

全球关注:河南发文加强人力资源品牌建设,重点打造10个省级品牌
头条 22-07-19
-

天天新动态:立方风控鸟·早报(7月19日)
头条 22-07-19
-
【世界新要闻】年内16家企业IPO被否,持续盈利能力频被问询
头条 22-07-19
-

世界快报:皮海洲:这只新股有点“诡“,老股民炒新遇上新问题
头条 22-07-19
-

全球最资讯丨科创板引入做市商进入倒计时 换手率有望提升15%
头条 22-07-18
-
即时:重庆银行:重庆市地产集团股东资格获核准
头条 22-07-18
-
每日短讯:万科分拆万物云境外上市 已获中国证监会核准
头条 22-07-18
-
天天动态:中金所公布中证1000股指期货和股指期权合约,7月22日起实施
头条 22-07-18
-

要闻:苏州银行:上半年实现净利润21.77亿元 同比增长25.11%
头条 22-07-18
-
精选!郑州市启动防汛蓝色预警响应
头条 22-07-18
-

当前热文:立方风控鸟·晚报(7月18日)
头条 22-07-18
-
焦点速讯:龙佰集团:子公司拟投资3亿元建设钪、钒、锰等有价金属回收项目
头条 22-07-18
-

世界球精选!“认养一头牛”原来是场游戏?网红牛奶IPO之路惹争议
头条 22-07-18
-

环球观点:又有两地发文,强力支持预制菜发展
头条 22-07-18
-

【速看料】国台办:敦促美方放弃打“台湾牌”的图谋,停止在涉台问题上进一步玩火
头条 22-07-18
-

全球观察:证监会批准开展中证1000股指期货和期权交易
头条 22-07-18
-

当前快播:中国信达总裁张卫东辞职
头条 22-07-18
-
世界速看:上半年河南外贸进出口总值近4000亿元,同比增长7.9%
头条 22-07-18
-
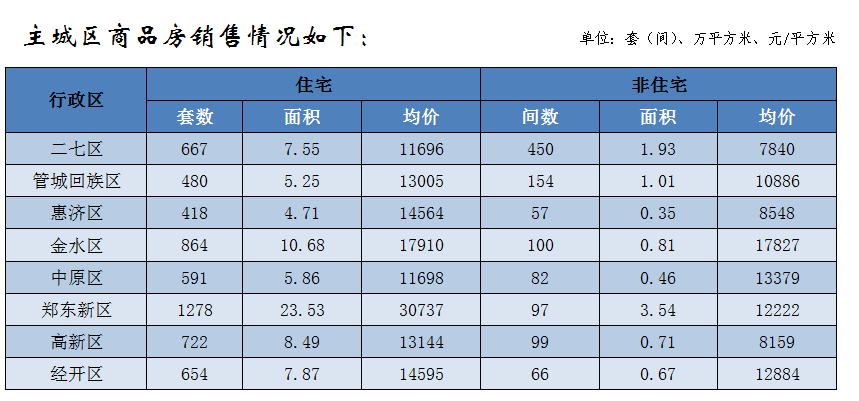
微头条丨郑州市6月商品住宅销售9847套,均价14479元/平方米
头条 22-07-18
-

环球今亮点!郑州5个住房租赁市场发展试点项目拟获奖补 | 名单
头条 22-07-18
-

天天精选!中原传媒上半年净利润4.58亿元,同比增长3.82%
头条 22-07-18
-

世界热推荐:河北将实施港口资源整合 拟组建河北渤海港口集团
头条 22-07-18
-

热点评!河南这家拟IPO企业披露业绩预告:预计上半年净利润翻倍
头条 22-07-18
-

世界视讯!自贸区郑州片区法院:4800余万元买卖合同纠纷成功调解
头条 22-07-18
-

全球简讯:焦作拟建计算机网络信息中心、中科院隶属区域超算中心
头条 22-07-18
-

天天最新:顾顼中国人寿再保险上海分公司总经理任职资格获批
头条 22-07-18
-

速递!中央网信办:集中查处散布虚假信息等问题 严厉查处诱导未成年人参与直播打赏
头条 22-07-18
-
全球聚焦:习酒投资控股集团成立!注册资本37.5亿,贵州省国资委全资持股
头条 22-07-18
-

【全球新视野】信阳发布最新规划,未来乡村将会有这些新变化
头条 22-07-18
-

当前视点!国家卫健委:昨日新增本土确诊病例117例
头条 22-07-18





























































































































- 每日焦点!虚拟脊髓让Morti机器狗在短短一2022-07-19
- 【全球报资讯】亚奥理事会宣布杭州亚运会新2022-07-19
- 天天热推荐:网传天津北辰爆燃事故为恶意报2022-07-19
- 【环球热闻】驻市工信局纪检监察组:以有力2022-07-19
- 世界视点!百万粉丝主播不想直播雇8人殴打2022-07-19
- 当前动态:驻市委政法委纪检监察组:自身净2022-07-19
- 当前观察:世纪佳缘“消失”高管已被拘留!2022-07-19
- 环球速递!驻市发改委纪检监察组:监督推动2022-07-19
- 环球关注:老人为瘫痪儿子讨要剩汤,北大校2022-07-19
- 观热点:开封市自然资源和规划局 组织召开2022-07-19
- 每日看点!余长坤调研铁路专用线项目进展情2022-07-19
- 环球速讯:长沙小伙为爱1个月转账8万,“女2022-07-19
- 全球即时看!郑州公布2021年度星级小微企业2022-07-19
- 最新资讯:海关总署:上半年RCEP项下中国出2022-07-19
- 【全球聚看点】"上头"电子烟是毒不2022-07-19
- 今日热闻!深圳证监局:部分私募机构涉嫌非2022-07-19
- 每日焦点!苏北盆地页岩勘探获重大突破!112022-07-19
- 世界快看:天津北辰燃气爆燃事故现场又一名2022-07-19
- 【播资讯】一片匠心在“玉壶”|记青年艺术2022-07-19
- 全球球精选!中央纪委国家监委:上半年处分2022-07-19
- 热门看点:「活动预告」品香茗·学茶艺——2022-07-19
- 热点评!「转发」大雨!暴雨!许昌发布重要2022-07-19
- 天天即时:暴雨,又来了!2022-07-19
- 快看:深圳证监局:部分私募机构涉嫌非法集2022-07-19
- 天天热议:利率2.48%!洛阳钼业完成发行102022-07-19
- 今日报丨鼓楼区文化和旅游局开展安全知识培2022-07-19
- 世界微资讯!丰富产品供给,周口辖内两家城2022-07-19
- 世界今亮点!河南19部门联合发布健康老龄化2022-07-19
- 快消息!工信部:工业经济企稳回升态势不会2022-07-19
- 天天视讯!工信部:多措并举提振工业经济 2022-07-19
精彩推荐



阅读排行
- 【播资讯】一片匠心在“玉壶”|记青年艺术家“弥芥堂”玉瓷工作室主理人姚剑锋
- 环球微动态丨《千古风流人物》今晚开播!这些“顶流”文豪,跟河南都有关系?
- 天天热点!河南发布地质灾害气象风险预警,做好防范
- 全球讯息:郑州钢笔画师:用钢笔勾勒郑州的变迁与细微
- 世界热消息:郑州市汛期地质灾害气象风险预警
- 天天观察:关于郑州市义务教育教师工资的问题 可以来这里投诉
- 热门看点:【争先崛起看中部③】晋豫携手“奇妙游”,记者实地体验晋阳湖畔美轮美奂的视觉盛宴
- 当前速读:河南国企改革三年行动晋级国家“A”级,迈入全国第一方阵
- 微速讯:今晚到明天,郑州地质灾害气象风险预警达到黄色预警的地区公布
- 全球讯息:上半年郑州优良天数90天 重污染天减少20%











